|
G+Smo
25.01.0
Geometry + Simulation Modules
|

|
|
G+Smo
25.01.0
Geometry + Simulation Modules
|
|
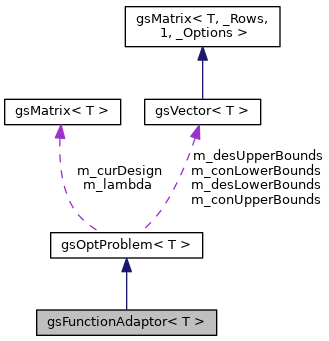
Adaptor to see a given gsFunction as (the objective of) an unconstrained optimization problem.
 Inheritance diagram for gsFunctionAdaptor< T >: Collaboration diagram for gsFunctionAdaptor< T >:
Inheritance diagram for gsFunctionAdaptor< T >: Collaboration diagram for gsFunctionAdaptor< T >:Public Member Functions | |
| virtual void | computeJacStructure () |
| Computes the sparsity pattern of the constraint Jacobian matrix. | |
| void | evalCon_into (const gsAsConstVector< T > &u, gsAsVector< T > &result) const |
| Returns values of the constraints at design value u. | |
| T | evalObj (const gsAsConstVector< T > &u) const |
| Returns the gradient value of the objective function at design value u. | |
| void | gradObj_into (const gsAsConstVector< T > &u, gsAsVector< T > &result) const |
| Returns the gradient of the objective function at design value u By default it uses finite differences, overriding it should provide exact gradient. | |
| gsFunctionAdaptor (const gsFunction< T > &obj) | |
| virtual void | hessLagr_into (const gsAsConstVector< T > &, gsAsVector< T > &) const |
| Returns Hessian Lagrangian of the constraints at design value. | |
| void | jacobCon_into (const gsAsConstVector< T > &u, gsAsVector< T > &result) const |
| Returns Jacobian of the constraints at design value u. Format of result is sparse, complying to m_conJacRows and m_conJacCols. | |
| int | numDesignVars () const |
| Callback function is executed after every iteration. Returning false causes premature termination of the optimization. | |
Protected Attributes | |
| std::vector< index_t > | m_conJacCols |
| Constraint Jacobian non-zero entries columns. | |
| std::vector< index_t > | m_conJacRows |
| Constraint Jacobian non-zero entries rows. | |
| gsVector< T > | m_conLowerBounds |
| Lower bounds for the constraints. | |
| gsVector< T > | m_conUpperBounds |
| Upper bounds for the constraints. | |
| gsMatrix< T > | m_curDesign |
| Current design variables (and starting point ) | |
| gsVector< T > | m_desLowerBounds |
| Lower bounds for the design variables. | |
| gsVector< T > | m_desUpperBounds |
| Upper bounds for the design variables. | |
| gsMatrix< T > | m_lambda |
| Lagrange multipliers (set in the finalize_solution method) | |
| int | m_numConJacNonZero |
| Number of nonzero entries in the Constraint Jacobian. | |
| int | m_numConstraints |
| Number of constraints. | |
| int | m_numDesignVars |
| Number of design variables. | |
|
inline |
bound_relax_factor
|
inlinevirtualinherited |
Computes the sparsity pattern of the constraint Jacobian matrix.
Number of constraints and design variables need to be set before calling this. By default the constraint Jacobian is set to full. Override this function to provide sparsity.