|
G+Smo
25.01.0
Geometry + Simulation Modules
|

|
|
G+Smo
25.01.0
Geometry + Simulation Modules
|
|
Class with a hierarchical domain structure represented by a box k-d-tree.
The hierarchical domain structure represets a sequence of domains \(\Omega^\ell \subset \Omega\) which are nested in the sense that
\[ \Omega = \Omega^0 \supset \Omega^1 \supset \Omega^2 \supset \ldots \supset \Omega^N \supset \Omega^{N+1} = \emptyset \]
Each subdomain \(\Omega^\ell\) is a (not necessarily connected) collection of axis-aligned elements/cells.
The information on the hierarchical domains is stored in a k-d-tree, where each leaf represents an axis-aligned box \(\omega \subseteq \Omega\), such that \(\omega \subseteq \Omega^\ell \land \omega \cap \Omega^{\ell+1} = \emptyset\) (i.e., each leaf of the tree can be assiciated with exactly one level of the hierarchy).
The implementation is, up to some technical differences, based on the technique described in the following publication
also available as a technical report
Regarding the mentioned technical differences: A binary tree is used instead of a quad-tree (which was discussed in the above-mentioned publications). Also, the domains are not necessarily split at their middle, but according to the position of the domain of the next level.
Template parameters
| d | is the dimension |
| Z | is the box-index type |
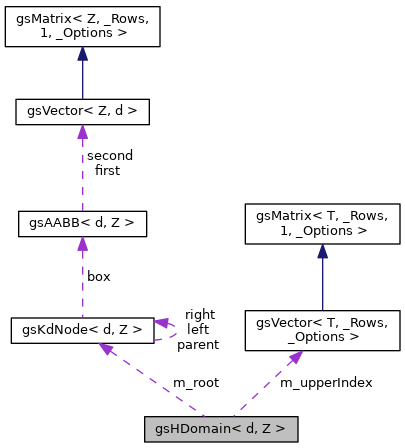
 Collaboration diagram for gsHDomain< d, Z >:
Collaboration diagram for gsHDomain< d, Z >:Classes | |
| struct | get_cell_visitor |
| Returns an cell/element box of a requested level. More... | |
| struct | levelDown_visitor |
| Decreases the level by 1 for all leaves. More... | |
| struct | levelUp_visitor |
| Increases the level by 1 for all leaves. More... | |
| struct | liftCoordsOneLevel_visitor |
| Multiplies everything by 2. More... | |
| struct | maxLevel_visitor |
| Decreases the level by 1 for all leaves. More... | |
| struct | numLeaves_visitor |
| Counts number of nodes in the tree. More... | |
| struct | numNodes_visitor |
| Counts number of nodes in the tree. More... | |
| struct | printLeaves_visitor |
| Counts number of nodes in the tree. More... | |
| struct | reduceCoordsOneLevel_visitor |
| Multiplies everything by 2. More... | |
Public Member Functions | |
| void | clearBox (point const &lower, point const &upper, int lvl) |
| The clear function which clears box defined by points lower and upper to level lvl. | |
| gsHDomain * | clone () const |
| Clones the object. | |
| void | decrementLevel () |
| Decrement the level index globally. | |
| void | divideByTwo () |
| Divide all coordinates by two. | |
| void | getBoxes (gsMatrix< Z > &b1, gsMatrix< Z > &b2, gsVector< Z > &level) const |
| Returns the boxes which make up the hierarchical domain and the respective levels. | |
| void | getBoxesInLevelIndex (gsMatrix< Z > &b1, gsMatrix< Z > &b2, gsVector< index_t > &level) const |
| void | getBoxesOnSide (boundary::side s, gsMatrix< Z > &b1, gsMatrix< Z > &b2, gsVector< Z > &level) const |
| Returns the boxes which make up the hierarchical domain and the respective levels touching side s. | |
| std::vector< std::vector< std::vector< std::vector< Z > > > > | getPolylines () const |
| gsHDomain (const gsHDomain &o) | |
| Copy constructor (makes a deep copy) | |
| void | incrementLevel () |
| Increment the level index globally. | |
| void | init (point const &upp) |
| Initialize the tree with computing the index_level. | |
| void | init (point const &upp, unsigned index_level) |
| Initialize the tree. | |
| void | insertBox (point const &lower, point const &upper, int lvl) |
| The insert function which insert box defined by points lower and upper to level lvl. | |
| void | insertBox (point const &lower, point const &upper, node *_node, int lvl) |
| The insert function which insert box defined by points lower and upper to level lvl. | |
| void | internalIndex (point const &point_idx, int lvl, point &internal_idx) |
| Returns the internal coordinates of point point_idx of level lvl. | |
| int | leafSize () const |
| Returns the number of leaves in the tree. | |
| int | levelOf (point const &p, int level) const |
| Returns the level of the point p. | |
| std::pair< int, int > | minMaxPath () const |
| Returns the minimim and maximum path length in the tree. | |
| void | multiplyByTwo () |
| Multiply all coordinates by two. | |
| int | numBreaks (int lvl, int k) const |
| Returns the number of distinct knots in direction k of level lvl. | |
| gsHDomain & | operator= (const gsHDomain &o) |
| Assignment operator (makes a deep copy) | |
| void | printLeaves () const |
| Prints out the leaves of the kd-tree. | |
| bool | query1 (point const &lower, point const &upper, int level) const |
| Returns true if the box defined by lower and upper is completely contained in level and does not overlap with any higher level. | |
| bool | query1 (point const &lower, point const &upper, int level, node *_node) const |
| Returns true if the box defined by lower and upper is completely contained in level and does not overlap with any higher level. | |
| bool | query2 (point const &lower, point const &upper, int level) const |
| Returns true if the box defined by lower and upper is completely contained in a Om-domain with a level different to level. | |
| bool | query2 (point const &lower, point const &upper, int level, node *_node) const |
| Returns true if the box defined by lower and upper is contained in a domain with a higher level than level. | |
| int | query3 (point const &k1, point const &k2, int level, node *_node) const |
| int | query3 (point const &lower, point const &upper, int level) const |
| Returns the lowest level \(\ell\) s.t. \(\omega \subseteq \Omega^\ell \land \omega
\cap \Omega^{\ell+1} = \emptyset \). | |
| int | query4 (point const &lower, point const &upper, int level) const |
| Returns the highest level with which the box defined by lower and upper overlaps. | |
| int | query4 (point const &lower, point const &upper, int level, node *_node) const |
| void | sinkBox (point const &lower, point const &upper, int lvl) |
| Sinks the box defined by points lower and upper to one level higher. | |
| int | size () const |
| Returns the number of nodes in the tree. | |
| const point & | upperCorner () const |
| Accessor for gsHDomain::m_upperIndex. | |
| const point | upperCornerIndex () const |
| Return the upper corner of the tree in level 0. | |
| ~gsHDomain () | |
| Destructor deletes the whole tree. | |
Private Member Functions | |
| template<typename visitor > | |
| visitor::return_type | boxSearch (point const &k1, point const &k2, int level, node *_node) const |
| void | connect_Boxes (std::vector< std::vector< Z > > &boxes) const |
| connect the boxes returned from quadtree getBoxes_vec() | |
| void | getBoxes_vec (std::vector< std::vector< Z > > &boxes) const |
| Represents boxes of the tree in a big vector. | |
| void | getRidOfOverlaps (std::list< std::list< gsVSegment< Z > > > &vert_seg_lists) const |
| template<typename visitor > | |
| visitor::return_type | leafSearch () const |
| template<typename visitor > | |
| visitor::return_type | nodeSearch () const |
| node * | pointSearch (const point &p, int level, node *_node) const |
| void | setIndexLevel (int) const |
| Adds nlevels new index levels in the tree. | |
| void | sweeplineConnectAndMerge (std::vector< std::vector< std::vector< Z > > > &result, std::list< std::list< gsVSegment< Z > > > &vert_seg_lists) const |
| Sweepline algorithm. | |
Static Private Member Functions | |
| static bool | haveOverlap (box const &box1, box const &box2) |
| static bool | isContained (box const &box1, box const &box2) |
| Returns true if box1 is contained in box2. | |
| static bool | isDegenerate (box const &someBox) |
| Returns true if the box is degenerate (has zero volume) | |
| static std::pair< point, point > | select_part (point const &k1, point const &k2, point const &k3, point const &k4) |
| static void | setLevel (node *_node, int lvl) |
Private Attributes | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW unsigned | m_indexLevel |
| The level of the box representation (global indices) | |
| unsigned | m_maxInsLevel |
| Maximum level present in the tree. | |
| node * | m_root |
| Pointer to the root node of the tree. | |
| point | m_upperIndex |
| Keeps the highest upper indices (at level gsHDomain::m_indexLevel) | |
|
private |
Iterates on the leafs of the tree and applies \ visitor. The visitor controls the return type and the update of the result type at every leaf node
The clear function which clears box defined by points lower and upper to level lvl.
[lower, upper] are given by unique knot indices of level lvl.
| lower | the lower left corner of the box given in lvl representation |
| upper | the upper right corner of the box given in lvl representation |
| lvl | the desired level |
|
private |
connect the boxes returned from quadtree getBoxes_vec()
If two neighbouring boxes could be represented by a single box (i.e., if the union of two axis-aligned boxes is again an axis-aligned box), then these two are merged into a single box.
| [in,out] | boxes | Format as of getBoxes_vec(), i.e., each box is represented as vector of size 2*d + 1 containing [ [lower corner],[upper corner], Level ], where the corners are defined by the knot indices on level gsHDomain::m_maxInsLevel. |
| void getBoxes | ( | gsMatrix< Z > & | b1, |
| gsMatrix< Z > & | b2, | ||
| gsVector< Z > & | level | ||
| ) | const |
Returns the boxes which make up the hierarchical domain and the respective levels.
Returns a list of boxes defined by left-bottom (b1) and right-top (b2) corners for the splitting in B-spline patches together with the corresponding levelOf()
The boxes b1 and b2 are given as matrices of size n x d, where d is the dimension of the domain, and where n is the number of boxes of the gsHDomain.
The numbers in b1 and b2 are given as unique knot indices of gsHDomain::m_maxInsLevel
| [out] | b1 | n x d-matrix, left bottom corners of boxes |
| [out] | b2 | n x d-matrix, right upper corners of boxes |
| [out] | level | vector of length n, corresponding levels |
|
private |
Represents boxes of the tree in a big vector.
| [out] | boxes | Each item corresponds to a box and is represented by a vector of unsigned ints. First the coordinates of the lower left, then the coordinates of the upper right corner, and then the level of this box (i.e., for each i, the size of boxes[i] is 2d+1, where d is the dimension of the domain). All indexing is in terms of level gsHDomain::m_maxInsLevel. |
| void getBoxesInLevelIndex | ( | gsMatrix< Z > & | b1, |
| gsMatrix< Z > & | b2, | ||
| gsVector< index_t > & | level | ||
| ) | const |
Returns a list of boxes defined by left-bottom (b1) and right-top (b2) corners for the splitting in B-spline patches together with the corresponding levelOf b1 and b2 are indexing in the corresponding level indices
| b1 | left bottom corners of boxes |
| b2 | right upper corners of boxs |
| level | corresponding levels |
| void getBoxesOnSide | ( | boundary::side | s, |
| gsMatrix< Z > & | b1, | ||
| gsMatrix< Z > & | b2, | ||
| gsVector< Z > & | level | ||
| ) | const |
Returns the boxes which make up the hierarchical domain and the respective levels touching side s.
Similar to getBoxes() with additional input of the side s. Returns only those boxes which touch the side s of the domain.
| [in] | s | Side (as in boundary::side) specifying the side of the domain |
| [out] | b1 | n x d-matrix, left bottom corners of boxes |
| [out] | b2 | n x d-matrix, right upper corners of boxes |
| [out] | level | vector of length n, corresponding levels |
| std::vector< std::vector< std::vector< std::vector< Z > > > > getPolylines | ( | ) | const |
return a list of polylines- boundaries of each connected component for all levels in the parameter space
|
private |
For each x-coordinate delete repeated parts of vertical segments. vert_seg_lists list, where for each x coordinate (sorted increasingly) a list of vertical segments with that coordinate is saved.
|
inlinestaticprivate |
Returns true if the boxes overlap
| box1 | |
| box2 |
|
inline |
The insert function which insert box defined by points lower and upper to level lvl.
[lower, upper] are given by unique knot indices of level lvl.
| lower | the lower left corner of the box given in lvl representation |
| upper | the upper right corner of the box given in lvl representation |
| lvl | the desired level |
| void insertBox | ( | point const & | lower, |
| point const & | upper, | ||
| node * | _node, | ||
| int | lvl | ||
| ) |
The insert function which insert box defined by points lower and upper to level lvl.
[lower, upper] are given by unique knot indices of level lvl
| lower | the lower left corner of the box |
| upper | the upper right corner of the box |
| *_node | the current node |
| lvl | the desired level |
|
private |
Iterates on the leafs of the tree and applies \ visitor. The visitor controls the operation to be performed
|
private |
Iterates on all the nodes of the tree and applies \ visitor. The visitor controls the operation to be performed
|
private |
Returns the leaf node of the subtree starting at _node that contains the input point p. The cells in the tree are considered half-open, i.e. in 2D they are of the form [a_1,b_1) x [a_2,b_2)
| bool query1 | ( | point const & | lower, |
| point const & | upper, | ||
| int | level | ||
| ) | const |
Returns true if the box defined by lower and upper is completely contained in level and does not overlap with any higher level.
More mathematically, returns true, if \(\omega \subseteq \Omega^{\mathsf{level}} \land \omega \cap \Omega^{\mathsf{level}+1} = \emptyset \), where \(\omega\) is the box defined by lower and upper.
Example: in two dimensons, let
\(\Omega^4 = (0.1,0.9)\times(0.2,0.7)\),
\(\Omega^5 = (0.4,0.8)\times(0.3,0.6) \subset \Omega^4\),
\(\Omega^6 = \emptyset \subset \Omega^5\).
Testing the box \( (0.1,0.4)\times(0.3,0.5)\), contained in \(\Omega^4 \setminus \Omega^5\), returns:
query1( [0.1,0.4], [0.3,0.5], 4 ) = true
query1( [0.1,0.4], [0.3,0.5], 5 ) = false
Testing the box \( (0.3,0.5)\times(0.4,0.5)\), partly overlapping \(\Omega^5\), returns:
query1( [0.3,0.4], [0.5,0.5], 4 ) = false
query1( [0.3,0.4], [0.5,0.5], 5 ) = false
Testing the box \( (0.6,0.8)\times(0.4,0.5)
\subset \Omega^5\) returns:
query1( [0.6,0.4], [0.8,0.5], 4 ) = false
query1( [0.6,0.4], [0.8,0.5], 5 ) = true
| lower | the lower left corner of the box |
| upper | the upper right corner of the box |
| level | the level to be checked against |
| bool query1 | ( | point const & | lower, |
| point const & | upper, | ||
| int | level, | ||
| node * | _node | ||
| ) | const |
Returns true if the box defined by lower and upper is completely contained in level and does not overlap with any higher level.
This query is called by the other query1() (the one without _node as input parameter) and starts checking at node _node of the k-d-tree.
| lower | the lower left corner of the box |
| upper | the upper right corner of the box |
| level | the level to be checked against |
| _node | node of the k-d-tree where the search starts. |
| bool query2 | ( | point const & | lower, |
| point const & | upper, | ||
| int | level | ||
| ) | const |
Returns true if the box defined by lower and upper is completely contained in a Om-domain with a level different to level.
| lower | the lower left corner of the box |
| upper | the upper right corner of the box |
| level | the level \( \ell_0 \) to be checked against |
| bool query2 | ( | point const & | lower, |
| point const & | upper, | ||
| int | level, | ||
| node * | _node | ||
| ) | const |
Returns true if the box defined by lower and upper is contained in a domain with a higher level than level.
| lower | lower left corner of the cube [k1,k2] |
| upper | upper right corner of the cube [k1,k2] |
| level | current level |
| _node | node of the k-d-tree where the search starts. |
| int query3 | ( | point const & | k1, |
| point const & | k2, | ||
| int | level, | ||
| node * | _node | ||
| ) | const |
query3 is used if both query1 and query2 are false to decide if the coresponding basis function is active or not. it returns the smallest level in which [k1,k2] is completely contained and not completely overlaped by higher omega structure. The idea is the same as in case of query1 and query2 but instead of returning a true or false value we remember the lowest level, which is returned at the end.
| int query3 | ( | point const & | lower, |
| point const & | upper, | ||
| int | level | ||
| ) | const |
Returns the lowest level \(\ell\) s.t. \(\omega \subseteq \Omega^\ell \land \omega \cap \Omega^{\ell+1} = \emptyset \).
...where \(\omega\) is the box defined by lower and upper.
| lower | the lower left corner of the box |
| upper | the upper right corner of the box |
| level | specifies which level lower and upper refer to. |
| int query4 | ( | point const & | lower, |
| point const & | upper, | ||
| int | level | ||
| ) | const |
Returns the highest level with which the box defined by lower and upper overlaps.
| lower | the lower left corner of the box |
| upper | the upper right corner of the box |
| level | specifies which level lower and upper refer to. |
| int query4 | ( | point const & | lower, |
| point const & | upper, | ||
| int | level, | ||
| node * | _node | ||
| ) | const |
query4 returns the highest level with which box [k1, k2] overlaps
|
staticprivate |
Returns two point- upper left and lower right corner of the overlaping part of [k1,k2] and [k3,k4]
| k1 | the lower left corner of the first box |
| k2 | the upper right corner of the first box |
| k3 | the lower left corner of the second box |
| k4 | the upper right corner of the second box |
Sets the level of all descendents of the node _node to level lvl if the level of the node is smaller then lvl. Otherwise the level of node is not changed
| *_node | the node whose descendents are to be set their levels |
| lvl | the new level for the descendents |
Sinks the box defined by points lower and upper to one level higher.
[lower, upper] are given by unique knot indices of level lvl.
| lower | the lower left corner of the box |
| upper | the upper right corner of the box |
| lvl | the level in which lower and upper are defined |